ORBIT
Contents
ORBIT
The logo used for the project. ORBIT stands for Opportunities for Robotics, Building & Inclusive Technology.
Role
UX Researcher & Design Lead
Dates
May 2024 – April 2025
Organization
Tufts Center for Engineering Education and Outreach (CEEO)
Funding
National Science Foundation (NSF) through CS for All
Grant #
#2318191
Team
Jennifer Cross, Ph.D. (PI); Elissa Milto, M.Ed. (Co-PI)
Participants
Autistic middle schoolers in A.I.M. Program, Winter Hill Community Innovation School
Methods
Co-design workshops, participatory design, ethnographic observation, thematic analysis
Tools
LEGO SPIKE Prime, Figma, NVivo, Sonix, Miro
Overview
Publication
Hayes, R., Milto, E., Goroza, E., & Cross, J. (2025). WIP: Development and pilot results of ORBIT: A visual robot-programming tool supporting computational thinking and executive functioning skills in special education. In 2025 IEEE Frontiers in Education Conference (FIE), Nashville, TN, pp. 1-5. doi: 10.1109/FIE63693.2025.11328697
Read the IEEE FIE 2025 Publication
Funding
ORBIT was funded by the National Science Foundation (NSF) through CS for All (Grant #2318191), which aims to improve accessibility in STEM for typically underrepresented populations.
Research team

- Dr. Jennifer Cross — Professor of Engineering, Tufts CEEO — Robotics expertise (PI) + Software development + Engineering education
- Elissa Milto — Director of Outreach, Tufts CEEO — Special education expertise
- Dr. Robert Hayes — Postdoc, Tufts CEEO — Engineering education expertise
- Evelyn Goroza — M.S. in Human Factors Engineering — User research & design expertise + Human factors engineering expertise
- Douglas & Ava — Undergraduate Computer Science & Engineering majors — Software development assistance
- Dr. Trevion Henderson (Independent Study advisor) — Professor of Mechanical Engineering — Ethnographic research guidance
- David Zabner (Independent Study advisor, additional) — Candidate for PhD, Advisee of Trevion Henderson

Background
ORBIT (Opportunities for Robotics, Building, and Inclusive Technology) is a LEGO robotics programming app co-designed with special-education educators to support Individualized Education Plan (IEP) goals, computational thinking (CT), and executive functioning (EF) skills for autistic middle schoolers in a Somerville, MA classroom. The project was funded by the National Science Foundation (NSF) through the CS for All: Research & RPPs program (Award No. 2318191), and was conducted at the Tufts Center for Engineering Education and Outreach (CEEO). The overarching goal was to understand how to design robotics and CT learning environments for autistic students.
Autistic students are traditionally underrepresented in STEM fields. ORBIT addresses this gap by creating a robotics-based learning environment specifically designed around the needs of autistic learners and the educators who support them. Rather than retrofitting existing tools, the research team worked directly with special-education teachers and the multidisciplinary IEP team at the Winter Hill Innovation School in Somerville, MA to co-design the tool from the ground up.
The project combined design-based research with a Research Practice Partnership (RPP) model, ensuring that the tool development was grounded in real classroom needs rather than theoretical assumptions. As the user researcher and designer on the team, I led the qualitative research activities, facilitated co-design workshops, and translated educator insights into interface design solutions.
The Individuals with Disabilities Education Act (IDEA) & Individual Education Plans (IEPs)
The Individuals with Disabilities Education Act (IDEA) mandates tailored education through IEPs for eligible students attending free public schools. An IEP is a legally binding document that outlines specific educational goals, accommodations, and services for each student. These plans are developed collaboratively by a multidisciplinary team including educators, administrators, speech-language pathologists, paraprofessionals, and counselors.
ORBIT was designed to align its learning activities with general features of IEPs, specifically targeting executive functioning skills — the cognitive processes that help students plan, organize, manage time, and regulate behavior. By building EF skill support directly into the tool, the project aimed to create a learning environment where IEP goals and CT skills could develop in tandem.
Computational thinking
Computational thinking (CT), as defined by Wing (2006), is the process of solving problems, designing systems, and understanding human behavior by drawing on concepts fundamental to computer science. It involves thinking at multiple levels of abstraction and is considered a fundamental skill that extends beyond writing code.
The CT skills targeted in the project can be thought of with the PRADA framework: Pattern Recognition, Abstraction, Decomposition, and Algorithms. These skills align naturally with executive functioning goals commonly found in IEPs. This overlap between CT and EF is what makes robotics activities a particularly promising vehicle for supporting autistic learners.
Project goals
- Build — Tool-Based CT Skill Support. Support the development of computational thinking skills through familiar robotics-based learning activities.
- Learn — Understand How to Target IEP Needs. Navigate new research landscape by exploring how to target general IEP goals shared across students by collaborating with IEP teams and leveraging internal team knowledge bases on special education.
- Rapport — Exercise the Research Practice Partnership. Build and maintain an RPP between the IEP educators and research institution in order to facilitate a sustainable, symbiotic relationship.
End Users: Target Learners
Middle school students (grades 6-8) in the A.I.M. special education program at the Winter Hill Innovation School in Somerville, MA.
Primary Stakeholders: Co-Design Team
The A.I.M. program's multidisciplinary IEP team, including A.I.M. program teachers (2 teachers), librarians, administrators, speech-language pathologists, paraprofessionals, and counselors.
Process & approach
Design-based research
We leveraged the design-based research approach known as co-design (Druin, 2002), integrating stakeholders directly into the design process. Co-design is a participatory approach where end-users and other stakeholders are treated as equal partners in the design process rather than passive subjects of study.
Co-design workshops
We hosted workshops with special-education teachers and other educators at the Winter Hill Innovation School in Somerville, MA. These sessions served two purposes: to understand educator needs as primary facilitators of the tool, and to operationalize student needs into design requirements for CT and EF skill development. The workshops were iterative — findings from each session directly informed the next round of design decisions. This tight feedback loop between educators and the research team ensured that the tool remained grounded in classroom reality rather than drifting toward idealized abstractions.

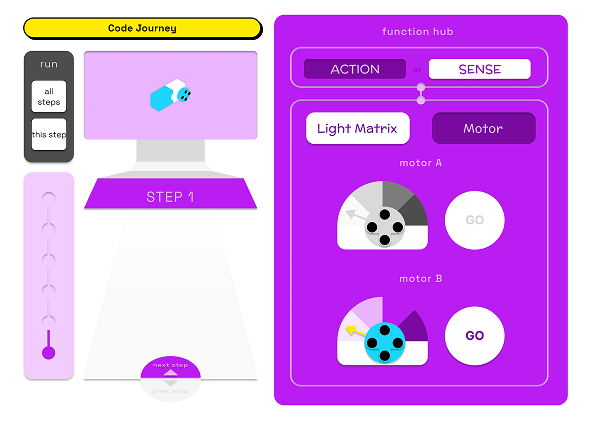
Version 2.0 (Following the workshop sessions on paper prototype V1.0): Code Journey interface with the motors A and B functions selected (at speed = 3) and dropped onto the track as the sixth coding step
Team Design Brainstorming Sessions
Our team leveraged conjecture mapping (Sandoval, 2014) to analyze the qualitative findings. Conjecture mapping is a systematic framework for articulating the theoretical assumptions underlying a designed learning environment and mapping those conjectures to observable outcomes.
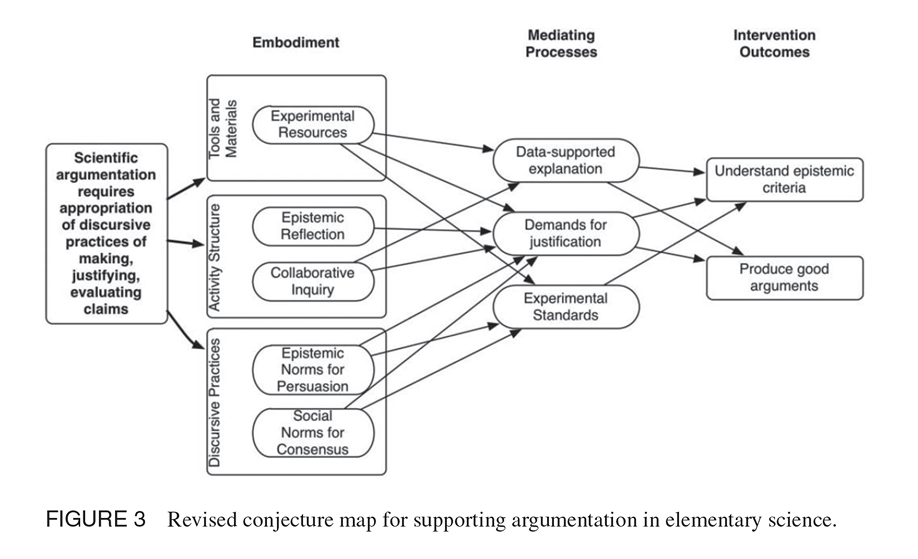
Diagram: Sandoval, 2017

Affinity diagramming the workshop insights during a team design session.
We followed the conjecture mapping process to conduct multiple design sessions, which included collaborative ideation of themes gathered from the workshops from qualitative analyses methods such as affinity diagramming and parsing through coded transcripts.
My independent contributions

Qualitative research & analysis
My qualitative research activities included: open-ended, semi-structured focus groups and 1:1 interviews with educators; ethnographic-style inquiry into classroom learning tools, workflows, and real-world application; and transcription and qualitative coding using manual affinity diagramming and tools (NVivo, Sonix).
Beyond data collection, I helped host co-design workshop sessions with IEP team educators, organized and prepared study recording devices and supported session logistics, and worked to balance designer–educator power dynamics while maintaining collaborative relationships.
Interface design visual language
A major part of my contribution was translating qualitative themes from both the research team sessions and IEP-collaborator workshops into concrete interface design solutions in Figma. I iterated prototype designs between workshop sessions, incorporating educator and team feedback, and refining the visual language of the tool.
Version 2.1 (Following the workshop sessions on Version 2.0): Code Journey intro screen
Version 2.1 (Following the workshop sessions on Version 2.0): Code Journey interface with the motor A function selected (at speed = 1) and dropped onto the track as the first coding step
Because the culture at CEEO and our specific research team encouraged highly independent, exploratory engagement in projects, I was able to implement some of my own ideas into the interfaces. For instance, I came up with a preliminary idea in which there were two general branches of the IEP tool: the Missions and Code Journey.
Missions would be the curriculum that educated the users on how to program one robot function at a time, such as programming the robot's hub. My rationale was that this would introduce enough structure to lessons segmented into palatable bite-sized lessons, which supports the CT skills abstraction (Filtering out unnecessary details to focus on essential information) and decomposition (Breaking complex, large problems into smaller, more manageable parts). In addition, the Missions were contrasted with the more fluid, independence-fostering practice of coding algorithms in the Code Journey, where users would be able to express creativity and design their own code, depending on pre-structured goals within classroom-wide activities.
I also applied some of my own general knowledge of color theory from my degree. Colors invite emotional and subconscious cues but also catered to the students' visual-oriented learning capabilities and familiarity with the visuals from existing classroom interfaces, which often featured attention-grabbing, saturated multicolor visuals. To enforce these ideas and the function of the Missions and Code Journey, the screens and components were differentiated by color: I colored Missions with a blue theme to echo preliminary blueprints and standardized instructional material, and colored Code Journey with a purple/magenta theme to allude to more playful, novel, creative idea-generation.
The general educational-themed and accessible, f the easy-reader typeface and salient, interactive components highlighted with shadows and bold strokes also echoed the students' needs. Furthermore, as an effort to support the CT skill of abstraction between each coding step and the mapped physical robot component, I designed repeated visuals to represent the physical robot components, each in slightly different ways (on the mission screen, on the track, on the function hub repository, and on the drag-and-drop chute).
Physical robot hub component from the LEGO Spike Prime kit
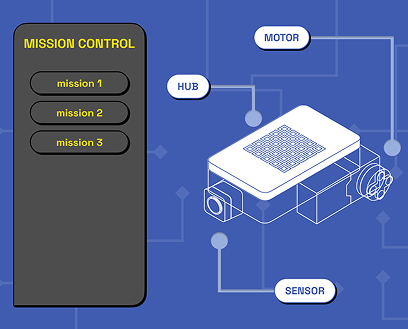
Mission control screen to select individual lessons ("missions")
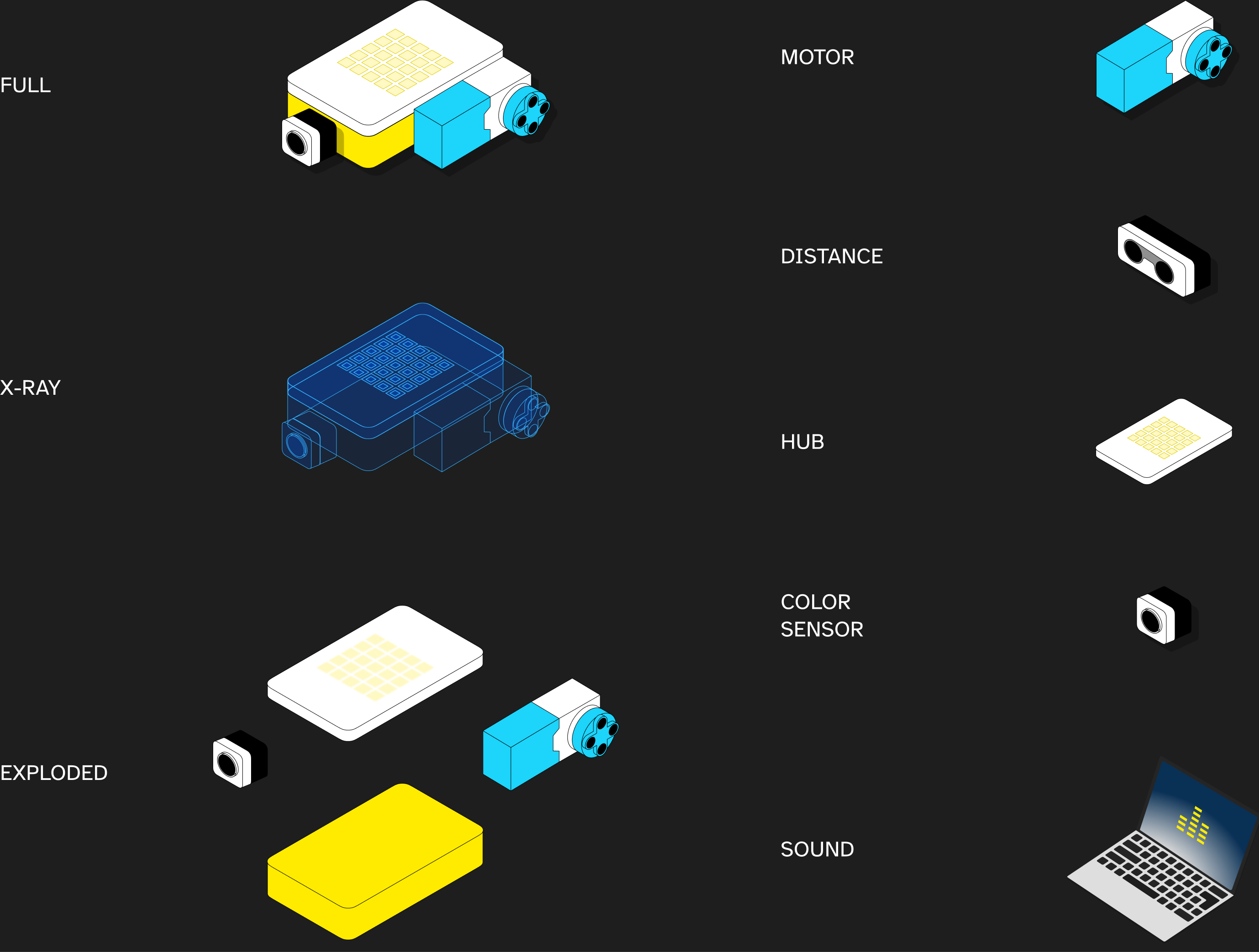
Robot components designed for the robot diagrams on mission control screens
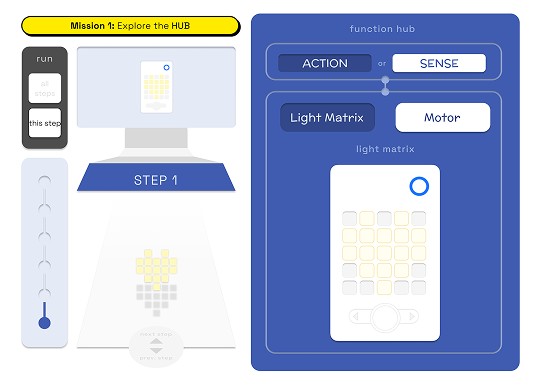
Version 2.1: Mission 1 interface with the hub's light matrix function selected and dropped onto the track as the first coding step
Independent Study: User testing plan
Advised by Trevion Henderson (and PhD student, David Zabner), I added an Independent Study class to my M.S. degree in conjunction with the full-time employment at the CEEO. I researched appropriate methods for planning user research with a variable and sensitive population for this exploratory study. The resulting user testing plan involved the real-time collection of user artifacts from a highly unstructured and unpredictable environment — a middle school autism classroom.
Structured Observation Tool
To address the challenges of this setting, I implemented a Structured Observation Tool drawn from ethnographic research practice, with the guidance of Dr. Trevion Henderson. This instrument was designed to capture naturalistic behavior in real time while maintaining the rigor necessary for academic research in a classroom where conditions are inherently fluid.
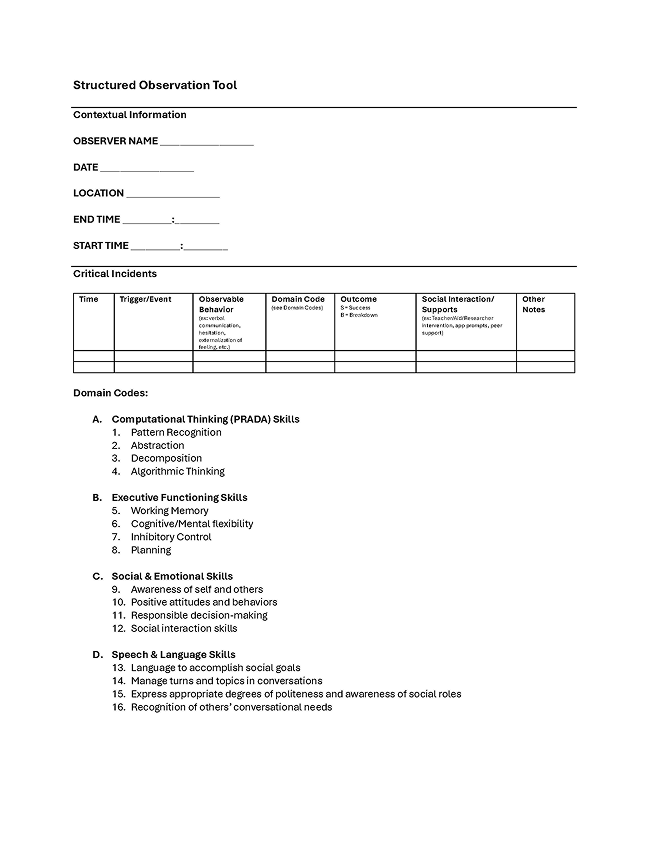
Final Structured Observation Tool: a guided document for the researcher to fill out during the in-classroom user testing of the ORBIT app
The tool captures critical incidents — observable moments triggered by specific events — and codes them across four skill domains: Computational Thinking (using the PRADA framework: Pattern Recognition, Abstraction, Decomposition, Algorithmic Thinking), Executive Functioning (Working Memory, Cognitive/Mental Flexibility, Inhibitory Control, Planning), Social & Emotional skills, and Speech & Language skills.
Project outcomes
Workshop findings informed prioritization of educator facilitation needs and classroom realism, shaping how CT skill-building and EF/IEP support were translated into the learning environment.

Version 2.1: Overlay pop-up automatically populated instructing the user of mission 1 completion after learning how to code the light matrix in a specific pattern
Resources developed
- ORBIT Prototype — A scaffolded coding missions app using LEGO Spike Prime robotics, with versions 2.0 and 3.0 developed iteratively from workshop findings.
- Physical planning board — A tangible planning tool for students to organize their approach before programming.
- Glossary poster — A classroom reference resource defining key CT and robotics vocabulary.
- Structured Observation Tool — An ethnographic instrument for real-time data collection in the classroom.
Limitations & impact
Some protocol and iteration details are intentionally described at a high level to respect IRB restrictions on disclosing exact study information. The project was conducted in a single classroom with a small number of students, which limits generalizability. However, the co-design methodology means the findings are deeply rooted in actual educator and learner needs.
References
Hayes, R., Milto, E., Goroza, E., & Cross, J. (2025). WIP: Development and pilot results of ORBIT: A visual robot-programming tool supporting computational thinking and executive functioning skills in special education. In 2025 IEEE Frontiers in Education Conference (FIE), Nashville, TN, pp. 1-5. doi: 10.1109/FIE63693.2025.11328697
Wing, J. M. (2006). Computational Thinking. Communications of the ACM, 49(3), 33–35.
Druin, A. (2002). The role of children in the design of new technology. Behaviour and Information Technology, 21(1), 1–25.
Sandoval, W. (2014). Conjecture mapping: An approach to systematic educational design research. Journal of the Learning Sciences, 23(1), 18–36.
ORBIT
Contents
ORBIT
The logo used for the project. ORBIT stands for Opportunities for Robotics, Building & Inclusive Technology.
Role
UX Researcher & Design Lead
Dates
May 2024 – April 2025
Organization
Tufts Center for Engineering Education and Outreach (CEEO)
Funding
National Science Foundation (NSF) through CS for All
Grant #
#2318191
Team
Jennifer Cross, Ph.D. (PI); Elissa Milto, M.Ed. (Co-PI)
Participants
Autistic middle schoolers in A.I.M. Program, Winter Hill Community Innovation School
Methods
Co-design workshops, participatory design, ethnographic observation, thematic analysis
Tools
LEGO SPIKE Prime, Figma, NVivo, Sonix, Miro
Overview
Publication
Hayes, R., Milto, E., Goroza, E., & Cross, J. (2025). WIP: Development and pilot results of ORBIT: A visual robot-programming tool supporting computational thinking and executive functioning skills in special education. In 2025 IEEE Frontiers in Education Conference (FIE), Nashville, TN, pp. 1-5. doi: 10.1109/FIE63693.2025.11328697
Read the IEEE FIE 2025 Publication
Funding
ORBIT was funded by the National Science Foundation (NSF) through CS for All (Grant #2318191), which aims to improve accessibility in STEM for typically underrepresented populations.
Research team
- Dr. Jennifer Cross — Professor of Engineering, Tufts CEEO — Robotics expertise (PI) + Software development + Engineering education
- Elissa Milto — Director of Outreach, Tufts CEEO — Special education expertise
- Dr. Robert Hayes — Postdoc, Tufts CEEO — Engineering education expertise
- Evelyn Goroza — M.S. in Human Factors Engineering — User research & design expertise + Human factors engineering expertise
- Douglas & Ava — Undergraduate Computer Science & Engineering majors — Software development assistance
- Dr. Trevion Henderson (Independent Study advisor) — Professor of Mechanical Engineering — Ethnographic research guidance
- David Zabner (Independent Study advisor, additional) — Candidate for PhD, Advisee of Trevion Henderson
Background
ORBIT (Opportunities for Robotics, Building, and Inclusive Technology) is a LEGO robotics programming app co-designed with special-education educators to support Individualized Education Plan (IEP) goals, computational thinking (CT), and executive functioning (EF) skills for autistic middle schoolers in a Somerville, MA classroom. The project was funded by the National Science Foundation (NSF) through the CS for All: Research & RPPs program (Award No. 2318191), and was conducted at the Tufts Center for Engineering Education and Outreach (CEEO). The overarching goal was to understand how to design robotics and CT learning environments for autistic students.
Autistic students are traditionally underrepresented in STEM fields. ORBIT addresses this gap by creating a robotics-based learning environment specifically designed around the needs of autistic learners and the educators who support them. Rather than retrofitting existing tools, the research team worked directly with special-education teachers and the multidisciplinary IEP team at the Winter Hill Innovation School in Somerville, MA to co-design the tool from the ground up.
The project combined design-based research with a Research Practice Partnership (RPP) model, ensuring that the tool development was grounded in real classroom needs rather than theoretical assumptions. As the user researcher and designer on the team, I led the qualitative research activities, facilitated co-design workshops, and translated educator insights into interface design solutions.
The Individuals with Disabilities Education Act (IDEA) & Individual Education Plans (IEPs)
The Individuals with Disabilities Education Act (IDEA) mandates tailored education through IEPs for eligible students attending free public schools. An IEP is a legally binding document that outlines specific educational goals, accommodations, and services for each student. These plans are developed collaboratively by a multidisciplinary team including educators, administrators, speech-language pathologists, paraprofessionals, and counselors.
ORBIT was designed to align its learning activities with general features of IEPs, specifically targeting executive functioning skills — the cognitive processes that help students plan, organize, manage time, and regulate behavior. By building EF skill support directly into the tool, the project aimed to create a learning environment where IEP goals and CT skills could develop in tandem.
Computational thinking
Computational thinking (CT), as defined by Wing (2006), is the process of solving problems, designing systems, and understanding human behavior by drawing on concepts fundamental to computer science. It involves thinking at multiple levels of abstraction and is considered a fundamental skill that extends beyond writing code.
The CT skills targeted in the project can be thought of with the PRADA framework: Pattern Recognition, Abstraction, Decomposition, and Algorithms. These skills align naturally with executive functioning goals commonly found in IEPs. This overlap between CT and EF is what makes robotics activities a particularly promising vehicle for supporting autistic learners.
Project goals
- Build — Tool-Based CT Skill Support. Support the development of computational thinking skills through familiar robotics-based learning activities.
- Learn — Understand How to Target IEP Needs. Navigate new research landscape by exploring how to target general IEP goals shared across students by collaborating with IEP teams and leveraging internal team knowledge bases on special education.
- Rapport — Exercise the Research Practice Partnership. Build and maintain an RPP between the IEP educators and research institution in order to facilitate a sustainable, symbiotic relationship.
End Users: Target Learners
Middle school students (grades 6-8) in the A.I.M. special education program at the Winter Hill Innovation School in Somerville, MA.
Primary Stakeholders: Co-Design Team
The A.I.M. program's multidisciplinary IEP team, including A.I.M. program teachers (2 teachers), librarians, administrators, speech-language pathologists, paraprofessionals, and counselors.
Process & approach
Design-based research
We leveraged the design-based research approach known as co-design (Druin, 2002), integrating stakeholders directly into the design process. Co-design is a participatory approach where end-users and other stakeholders are treated as equal partners in the design process rather than passive subjects of study.
Co-design workshops
We hosted workshops with special-education teachers and other educators at the Winter Hill Innovation School in Somerville, MA. These sessions served two purposes: to understand educator needs as primary facilitators of the tool, and to operationalize student needs into design requirements for CT and EF skill development. The workshops were iterative — findings from each session directly informed the next round of design decisions. This tight feedback loop between educators and the research team ensured that the tool remained grounded in classroom reality rather than drifting toward idealized abstractions.
Version 2.0 (Following the workshop sessions on paper prototype V1.0): Code Journey interface with the motors A and B functions selected (at speed = 3) and dropped onto the track as the sixth coding step
Team Design Brainstorming Sessions
Our team leveraged conjecture mapping (Sandoval, 2014) to analyze the qualitative findings. Conjecture mapping is a systematic framework for articulating the theoretical assumptions underlying a designed learning environment and mapping those conjectures to observable outcomes.
Diagram: Sandoval, 2017
Affinity diagramming the workshop insights during a team design session.
We followed the conjecture mapping process to conduct multiple design sessions, which included collaborative ideation of themes gathered from the workshops from qualitative analyses methods such as affinity diagramming and parsing through coded transcripts.
My independent contributions
Qualitative research & analysis
My qualitative research activities included: open-ended, semi-structured focus groups and 1:1 interviews with educators; ethnographic-style inquiry into classroom learning tools, workflows, and real-world application; and transcription and qualitative coding using manual affinity diagramming and tools (NVivo, Sonix).
Beyond data collection, I helped host co-design workshop sessions with IEP team educators, organized and prepared study recording devices and supported session logistics, and worked to balance designer–educator power dynamics while maintaining collaborative relationships.
Interface design visual language
A major part of my contribution was translating qualitative themes from both the research team sessions and IEP-collaborator workshops into concrete interface design solutions in Figma. I iterated prototype designs between workshop sessions, incorporating educator and team feedback, and refining the visual language of the tool.
Version 2.1 (Following the workshop sessions on Version 2.0): Code Journey intro screen
Version 2.1 (Following the workshop sessions on Version 2.0): Code Journey interface with the motor A function selected (at speed = 1) and dropped onto the track as the first coding step
Because the culture at CEEO and our specific research team encouraged highly independent, exploratory engagement in projects, I was able to implement some of my own ideas into the interfaces. For instance, I came up with a preliminary idea in which there were two general branches of the IEP tool: the Missions and Code Journey.
Missions would be the curriculum that educated the users on how to program one robot function at a time, such as programming the robot's hub. My rationale was that this would introduce enough structure to lessons segmented into palatable bite-sized lessons, which supports the CT skills abstraction (Filtering out unnecessary details to focus on essential information) and decomposition (Breaking complex, large problems into smaller, more manageable parts). In addition, the Missions were contrasted with the more fluid, independence-fostering practice of coding algorithms in the Code Journey, where users would be able to express creativity and design their own code, depending on pre-structured goals within classroom-wide activities.
I also applied some of my own general knowledge of color theory from my degree. Colors invite emotional and subconscious cues but also catered to the students' visual-oriented learning capabilities and familiarity with the visuals from existing classroom interfaces, which often featured attention-grabbing, saturated multicolor visuals. To enforce these ideas and the function of the Missions and Code Journey, the screens and components were differentiated by color: I colored Missions with a blue theme to echo preliminary blueprints and standardized instructional material, and colored Code Journey with a purple/magenta theme to allude to more playful, novel, creative idea-generation.
The general educational-themed and accessible, f the easy-reader typeface and salient, interactive components highlighted with shadows and bold strokes also echoed the students' needs. Furthermore, as an effort to support the CT skill of abstraction between each coding step and the mapped physical robot component, I designed repeated visuals to represent the physical robot components, each in slightly different ways (on the mission screen, on the track, on the function hub repository, and on the drag-and-drop chute).
Physical robot hub component from the LEGO Spike Prime kit
Mission control screen to select individual lessons ("missions")
Robot components designed for the robot diagrams on mission control screens
Version 2.1: Mission 1 interface with the hub's light matrix function selected and dropped onto the track as the first coding step
Independent Study: User testing plan
Advised by Trevion Henderson (and PhD student, David Zabner), I added an Independent Study class to my M.S. degree in conjunction with the full-time employment at the CEEO. I researched appropriate methods for planning user research with a variable and sensitive population for this exploratory study. The resulting user testing plan involved the real-time collection of user artifacts from a highly unstructured and unpredictable environment — a middle school autism classroom.
Structured Observation Tool
To address the challenges of this setting, I implemented a Structured Observation Tool drawn from ethnographic research practice, with the guidance of Dr. Trevion Henderson. This instrument was designed to capture naturalistic behavior in real time while maintaining the rigor necessary for academic research in a classroom where conditions are inherently fluid.
Final Structured Observation Tool: a guided document for the researcher to fill out during the in-classroom user testing of the ORBIT app
The tool captures critical incidents — observable moments triggered by specific events — and codes them across four skill domains: Computational Thinking (using the PRADA framework: Pattern Recognition, Abstraction, Decomposition, Algorithmic Thinking), Executive Functioning (Working Memory, Cognitive/Mental Flexibility, Inhibitory Control, Planning), Social & Emotional skills, and Speech & Language skills.
Project outcomes
Workshop findings informed prioritization of educator facilitation needs and classroom realism, shaping how CT skill-building and EF/IEP support were translated into the learning environment.
Version 2.1: Overlay pop-up automatically populated instructing the user of mission 1 completion after learning how to code the light matrix in a specific pattern
Resources developed
- ORBIT Prototype — A scaffolded coding missions app using LEGO Spike Prime robotics, with versions 2.0 and 3.0 developed iteratively from workshop findings.
- Physical planning board — A tangible planning tool for students to organize their approach before programming.
- Glossary poster — A classroom reference resource defining key CT and robotics vocabulary.
- Structured Observation Tool — An ethnographic instrument for real-time data collection in the classroom.
Limitations & impact
Some protocol and iteration details are intentionally described at a high level to respect IRB restrictions on disclosing exact study information. The project was conducted in a single classroom with a small number of students, which limits generalizability. However, the co-design methodology means the findings are deeply rooted in actual educator and learner needs.
References
Hayes, R., Milto, E., Goroza, E., & Cross, J. (2025). WIP: Development and pilot results of ORBIT: A visual robot-programming tool supporting computational thinking and executive functioning skills in special education. In 2025 IEEE Frontiers in Education Conference (FIE), Nashville, TN, pp. 1-5. doi: 10.1109/FIE63693.2025.11328697
Wing, J. M. (2006). Computational Thinking. Communications of the ACM, 49(3), 33–35.
Druin, A. (2002). The role of children in the design of new technology. Behaviour and Information Technology, 21(1), 1–25.
Sandoval, W. (2014). Conjecture mapping: An approach to systematic educational design research. Journal of the Learning Sciences, 23(1), 18–36.
ORBIT
Contents
ORBIT
The logo used for the project. ORBIT stands for Opportunities for Robotics, Building & Inclusive Technology.
Role
UX Researcher & Design Lead
Dates
May 2024 – April 2025
Organization
Tufts Center for Engineering Education and Outreach (CEEO)
Funding
National Science Foundation (NSF) through CS for All
Grant #
#2318191
Team
Jennifer Cross, Ph.D. (PI); Elissa Milto, M.Ed. (Co-PI)
Participants
Autistic middle schoolers in A.I.M. Program, Winter Hill Community Innovation School
Methods
Co-design workshops, participatory design, ethnographic observation, thematic analysis
Tools
LEGO SPIKE Prime, Figma, NVivo, Sonix, Miro
Overview
Publication
Hayes, R., Milto, E., Goroza, E., & Cross, J. (2025). WIP: Development and pilot results of ORBIT: A visual robot-programming tool supporting computational thinking and executive functioning skills in special education. In 2025 IEEE Frontiers in Education Conference (FIE), Nashville, TN, pp. 1-5. doi: 10.1109/FIE63693.2025.11328697
Read the IEEE FIE 2025 Publication
Funding
ORBIT was funded by the National Science Foundation (NSF) through CS for All (Grant #2318191), which aims to improve accessibility in STEM for typically underrepresented populations.
Research team
- Dr. Jennifer Cross — Professor of Engineering, Tufts CEEO — Robotics expertise (PI) + Software development + Engineering education
- Elissa Milto — Director of Outreach, Tufts CEEO — Special education expertise
- Dr. Robert Hayes — Postdoc, Tufts CEEO — Engineering education expertise
- Evelyn Goroza — M.S. in Human Factors Engineering — User research & design expertise + Human factors engineering expertise
- Douglas & Ava — Undergraduate Computer Science & Engineering majors — Software development assistance
- Dr. Trevion Henderson (Independent Study advisor) — Professor of Mechanical Engineering — Ethnographic research guidance
- David Zabner (Independent Study advisor, additional) — Candidate for PhD, Advisee of Trevion Henderson
Background
ORBIT (Opportunities for Robotics, Building, and Inclusive Technology) is a LEGO robotics programming app co-designed with special-education educators to support Individualized Education Plan (IEP) goals, computational thinking (CT), and executive functioning (EF) skills for autistic middle schoolers in a Somerville, MA classroom. The project was funded by the National Science Foundation (NSF) through the CS for All: Research & RPPs program (Award No. 2318191), and was conducted at the Tufts Center for Engineering Education and Outreach (CEEO). The overarching goal was to understand how to design robotics and CT learning environments for autistic students.
Autistic students are traditionally underrepresented in STEM fields. ORBIT addresses this gap by creating a robotics-based learning environment specifically designed around the needs of autistic learners and the educators who support them. Rather than retrofitting existing tools, the research team worked directly with special-education teachers and the multidisciplinary IEP team at the Winter Hill Innovation School in Somerville, MA to co-design the tool from the ground up.
The project combined design-based research with a Research Practice Partnership (RPP) model, ensuring that the tool development was grounded in real classroom needs rather than theoretical assumptions. As the user researcher and designer on the team, I led the qualitative research activities, facilitated co-design workshops, and translated educator insights into interface design solutions.
The Individuals with Disabilities Education Act (IDEA) & Individual Education Plans (IEPs)
The Individuals with Disabilities Education Act (IDEA) mandates tailored education through IEPs for eligible students attending free public schools. An IEP is a legally binding document that outlines specific educational goals, accommodations, and services for each student. These plans are developed collaboratively by a multidisciplinary team including educators, administrators, speech-language pathologists, paraprofessionals, and counselors.
ORBIT was designed to align its learning activities with general features of IEPs, specifically targeting executive functioning skills — the cognitive processes that help students plan, organize, manage time, and regulate behavior. By building EF skill support directly into the tool, the project aimed to create a learning environment where IEP goals and CT skills could develop in tandem.
Computational thinking
Computational thinking (CT), as defined by Wing (2006), is the process of solving problems, designing systems, and understanding human behavior by drawing on concepts fundamental to computer science. It involves thinking at multiple levels of abstraction and is considered a fundamental skill that extends beyond writing code.
The CT skills targeted in the project can be thought of with the PRADA framework: Pattern Recognition, Abstraction, Decomposition, and Algorithms. These skills align naturally with executive functioning goals commonly found in IEPs. This overlap between CT and EF is what makes robotics activities a particularly promising vehicle for supporting autistic learners.
Project goals
- Build — Tool-Based CT Skill Support. Support the development of computational thinking skills through familiar robotics-based learning activities.
- Learn — Understand How to Target IEP Needs. Navigate new research landscape by exploring how to target general IEP goals shared across students by collaborating with IEP teams and leveraging internal team knowledge bases on special education.
- Rapport — Exercise the Research Practice Partnership. Build and maintain an RPP between the IEP educators and research institution in order to facilitate a sustainable, symbiotic relationship.
End Users: Target Learners
Middle school students (grades 6-8) in the A.I.M. special education program at the Winter Hill Innovation School in Somerville, MA.
Primary Stakeholders: Co-Design Team
The A.I.M. program's multidisciplinary IEP team, including A.I.M. program teachers (2 teachers), librarians, administrators, speech-language pathologists, paraprofessionals, and counselors.
Process & approach
Design-based research
We leveraged the design-based research approach known as co-design (Druin, 2002), integrating stakeholders directly into the design process. Co-design is a participatory approach where end-users and other stakeholders are treated as equal partners in the design process rather than passive subjects of study.
Co-design workshops
We hosted workshops with special-education teachers and other educators at the Winter Hill Innovation School in Somerville, MA. These sessions served two purposes: to understand educator needs as primary facilitators of the tool, and to operationalize student needs into design requirements for CT and EF skill development. The workshops were iterative — findings from each session directly informed the next round of design decisions. This tight feedback loop between educators and the research team ensured that the tool remained grounded in classroom reality rather than drifting toward idealized abstractions.
Version 2.0 (Following the workshop sessions on paper prototype V1.0): Code Journey interface with the motors A and B functions selected (at speed = 3) and dropped onto the track as the sixth coding step
Team Design Brainstorming Sessions
Our team leveraged conjecture mapping (Sandoval, 2014) to analyze the qualitative findings. Conjecture mapping is a systematic framework for articulating the theoretical assumptions underlying a designed learning environment and mapping those conjectures to observable outcomes.
Diagram: Sandoval, 2017
Affinity diagramming the workshop insights during a team design session.
We followed the conjecture mapping process to conduct multiple design sessions, which included collaborative ideation of themes gathered from the workshops from qualitative analyses methods such as affinity diagramming and parsing through coded transcripts.
My independent contributions
Qualitative research & analysis
My qualitative research activities included: open-ended, semi-structured focus groups and 1:1 interviews with educators; ethnographic-style inquiry into classroom learning tools, workflows, and real-world application; and transcription and qualitative coding using manual affinity diagramming and tools (NVivo, Sonix).
Beyond data collection, I helped host co-design workshop sessions with IEP team educators, organized and prepared study recording devices and supported session logistics, and worked to balance designer–educator power dynamics while maintaining collaborative relationships.
Interface design visual language
A major part of my contribution was translating qualitative themes from both the research team sessions and IEP-collaborator workshops into concrete interface design solutions in Figma. I iterated prototype designs between workshop sessions, incorporating educator and team feedback, and refining the visual language of the tool.
Version 2.1 (Following the workshop sessions on Version 2.0): Code Journey intro screen
Version 2.1 (Following the workshop sessions on Version 2.0): Code Journey interface with the motor A function selected (at speed = 1) and dropped onto the track as the first coding step
Because the culture at CEEO and our specific research team encouraged highly independent, exploratory engagement in projects, I was able to implement some of my own ideas into the interfaces. For instance, I came up with a preliminary idea in which there were two general branches of the IEP tool: the Missions and Code Journey.
Missions would be the curriculum that educated the users on how to program one robot function at a time, such as programming the robot's hub. My rationale was that this would introduce enough structure to lessons segmented into palatable bite-sized lessons, which supports the CT skills abstraction (Filtering out unnecessary details to focus on essential information) and decomposition (Breaking complex, large problems into smaller, more manageable parts). In addition, the Missions were contrasted with the more fluid, independence-fostering practice of coding algorithms in the Code Journey, where users would be able to express creativity and design their own code, depending on pre-structured goals within classroom-wide activities.
I also applied some of my own general knowledge of color theory from my degree. Colors invite emotional and subconscious cues but also catered to the students' visual-oriented learning capabilities and familiarity with the visuals from existing classroom interfaces, which often featured attention-grabbing, saturated multicolor visuals. To enforce these ideas and the function of the Missions and Code Journey, the screens and components were differentiated by color: I colored Missions with a blue theme to echo preliminary blueprints and standardized instructional material, and colored Code Journey with a purple/magenta theme to allude to more playful, novel, creative idea-generation.
The general educational-themed and accessible, f the easy-reader typeface and salient, interactive components highlighted with shadows and bold strokes also echoed the students' needs. Furthermore, as an effort to support the CT skill of abstraction between each coding step and the mapped physical robot component, I designed repeated visuals to represent the physical robot components, each in slightly different ways (on the mission screen, on the track, on the function hub repository, and on the drag-and-drop chute).
Physical robot hub component from the LEGO Spike Prime kit
Mission control screen to select individual lessons ("missions")
Robot components designed for the robot diagrams on mission control screens
Version 2.1: Mission 1 interface with the hub's light matrix function selected and dropped onto the track as the first coding step
Independent Study: User testing plan
Advised by Trevion Henderson (and PhD student, David Zabner), I added an Independent Study class to my M.S. degree in conjunction with the full-time employment at the CEEO. I researched appropriate methods for planning user research with a variable and sensitive population for this exploratory study. The resulting user testing plan involved the real-time collection of user artifacts from a highly unstructured and unpredictable environment — a middle school autism classroom.
Structured Observation Tool
To address the challenges of this setting, I implemented a Structured Observation Tool drawn from ethnographic research practice, with the guidance of Dr. Trevion Henderson. This instrument was designed to capture naturalistic behavior in real time while maintaining the rigor necessary for academic research in a classroom where conditions are inherently fluid.
Final Structured Observation Tool: a guided document for the researcher to fill out during the in-classroom user testing of the ORBIT app
The tool captures critical incidents — observable moments triggered by specific events — and codes them across four skill domains: Computational Thinking (using the PRADA framework: Pattern Recognition, Abstraction, Decomposition, Algorithmic Thinking), Executive Functioning (Working Memory, Cognitive/Mental Flexibility, Inhibitory Control, Planning), Social & Emotional skills, and Speech & Language skills.
Project outcomes
Workshop findings informed prioritization of educator facilitation needs and classroom realism, shaping how CT skill-building and EF/IEP support were translated into the learning environment.
Version 2.1: Overlay pop-up automatically populated instructing the user of mission 1 completion after learning how to code the light matrix in a specific pattern
Resources developed
- ORBIT Prototype — A scaffolded coding missions app using LEGO Spike Prime robotics, with versions 2.0 and 3.0 developed iteratively from workshop findings.
- Physical planning board — A tangible planning tool for students to organize their approach before programming.
- Glossary poster — A classroom reference resource defining key CT and robotics vocabulary.
- Structured Observation Tool — An ethnographic instrument for real-time data collection in the classroom.
Limitations & impact
Some protocol and iteration details are intentionally described at a high level to respect IRB restrictions on disclosing exact study information. The project was conducted in a single classroom with a small number of students, which limits generalizability. However, the co-design methodology means the findings are deeply rooted in actual educator and learner needs.
References
Hayes, R., Milto, E., Goroza, E., & Cross, J. (2025). WIP: Development and pilot results of ORBIT: A visual robot-programming tool supporting computational thinking and executive functioning skills in special education. In 2025 IEEE Frontiers in Education Conference (FIE), Nashville, TN, pp. 1-5. doi: 10.1109/FIE63693.2025.11328697
Wing, J. M. (2006). Computational Thinking. Communications of the ACM, 49(3), 33–35.
Druin, A. (2002). The role of children in the design of new technology. Behaviour and Information Technology, 21(1), 1–25.
Sandoval, W. (2014). Conjecture mapping: An approach to systematic educational design research. Journal of the Learning Sciences, 23(1), 18–36.